Mae effaith weldio weldio robotiaid yn cael ei heffeithio gan lawer o agweddau. Bydd llawer o gwsmeriaid yn dod ar draws rhai problemau fwy neu lai cyn iddynt fod yn hyfedr wrth ddefnyddio robotiaid weldio. Yn y bôn, mae'r problemau hyn yn cael eu hachosi gan weithrediad amhriodol neu osodiadau robot amhriodol, a gellir eu datrys gydag addasiadau priodol. Nesaf, bydd y golygydd yn eich tywys i asesu rhai problemau sy'n aml yn digwydd wrth ddefnyddio robotiaid weldio Yunhua ac atebion cysylltiedig.
1. Cychwyn arc aflwyddiannus yn ystod weldio
1. Nid yw'r arc wedi dechrau eto
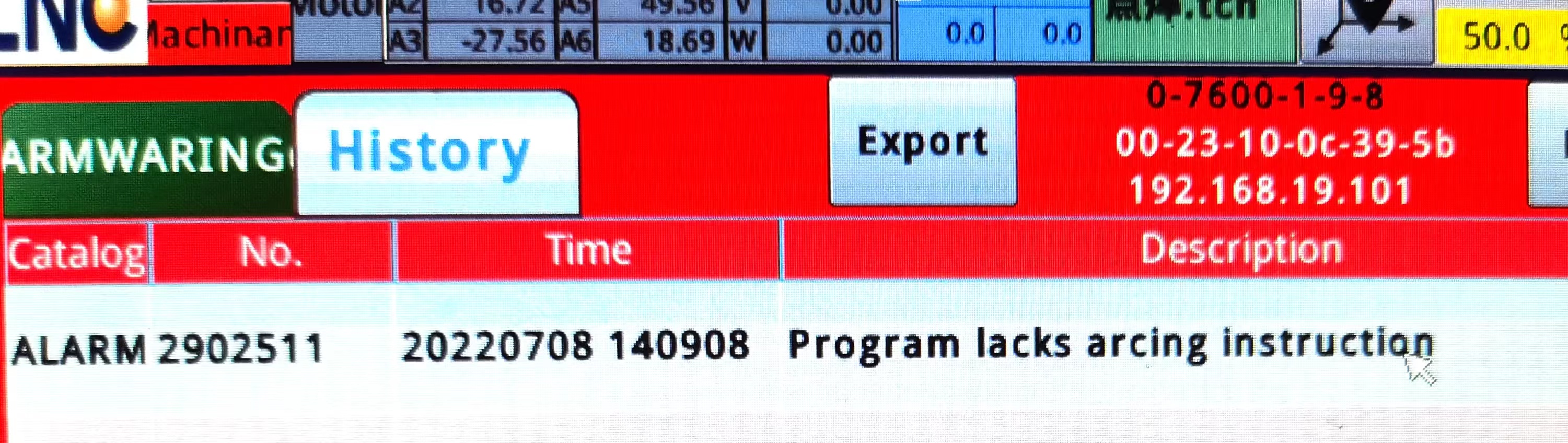
Rheswm: Nid oes gorchymyn cychwyn arc cyfatebol cyn gweithredu'r gorchymyn diweddu arc yn y rhaglen olygedig
Dull prosesu: Gwiriwch a ddylid ychwanegu un gorchymyn diweddu arc arall neu un gorchymyn cychwyn arc yn llai
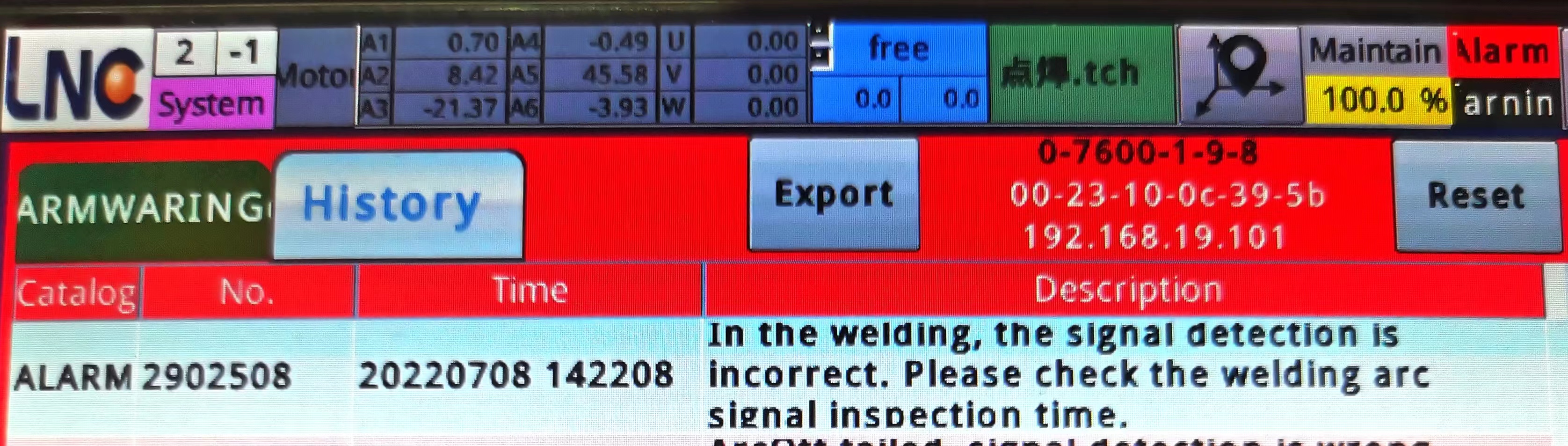
2. Methwyd cychwyn yr arc, mae'r canfod signal yn anghywir
Dull:
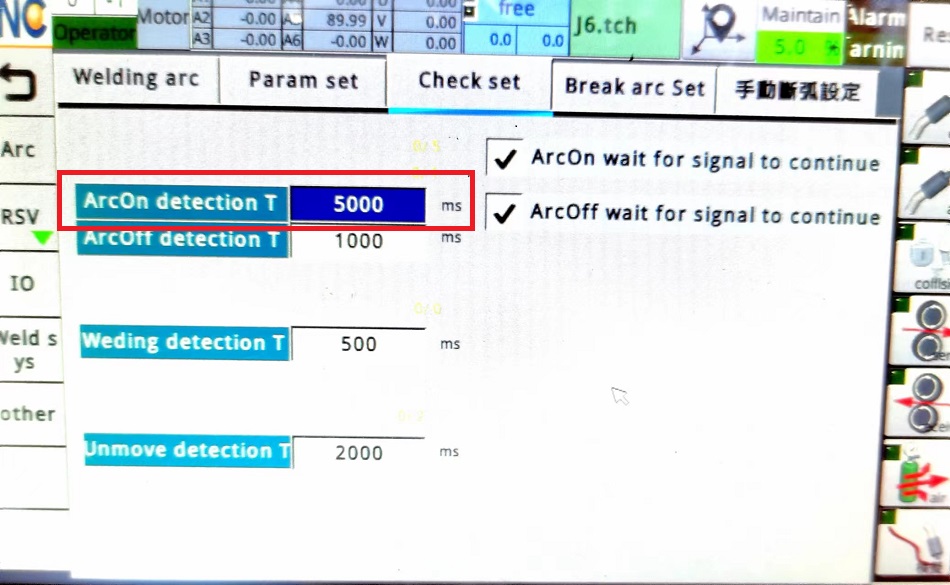
1) Gwiriwch y gosodiad amser torri weldio ar y dudalen paramedr. Yn gyffredinol, mae'n briodol gosod yr amser i 5000ms.
2) Gwiriwch a yw signal y peiriant weldio wedi'i drosglwyddo'n llwyddiannus i'r system
3) Gwiriwch a yw'r darn gwaith wedi'i seilio
3. Gwifren wedi'i Ffrio ag Arc
rheswm:
1) Anghydweddiad cerrynt a foltedd
Dull prosesu: Mae angen i ni osod y cerrynt a'r foltedd priodol yn ôl trwch gwirioneddol y darn gwaith a'r peiriant weldio
2) Mae hyd y wifren weldio yn rhy hir
Dull triniaeth: Yn gyffredinol, mae hyd y wifren weldio yn 10 i 15 gwaith diamedr y wifren weldio, a dewisir hyd priodol y wifren weldio yn ôl diamedr y wifren weldio.

Mae rhy ychydig o gerrynt yn arwain at weldiadau anwastad

Cerrynt a foltedd arferol, weldiad hardd a chadarn

Bydd pen y fflam weldio yn pêlio'r wifren

Mae gwifren pen y fflam weldio mewn cyflwr da ar ôl weldio arferol
4. Mae ffenomen diffodd arc awtomatig yn digwydd ar ôl arcio
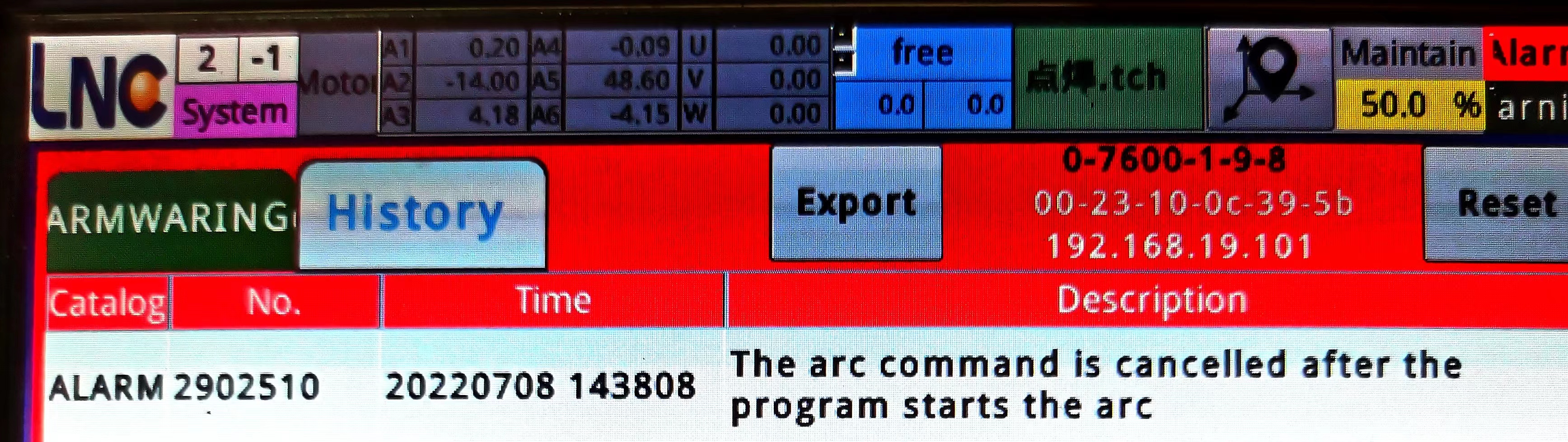
Datrysiad: Gwiriwch a oes problem gyda'r paramedr amser ddim yn symud gosodiad amser, a gwiriwch a yw'r ffagl weldio wedi symud.
2. Mae toriad arc yn digwydd yn ystod weldio
rheswm:
1. Os nad yw'r wifren weldio yn cyffwrdd â'r darn gwaith, bydd y larwm torri arc yn cael ei sbarduno
Dull triniaeth: Addaswch safle'r wifren weldio a'r darn gwaith, fel bod y wifren weldio yn cysylltu'n llwyr â'r darn gwaith yn ystod y broses weldio. (Ond ni ddylai fod yn rhy agos at y darn gwaith, gall arwain at weldio trwy'r darn gwaith)
2. Mae'r llwybr weldio afresymol yn achosi i ben y gwn godi'n awtomatig oherwydd gwrthdrawiad
Datrysiad: ailosod y llwybr weldio
3. Mae gwifrau positif a negatif y peiriant weldio mewn cysylltiad gwael
Dull triniaeth: Gwiriwch gyflwr gwifrau'r gwifrau positif a negatif
3. Rhesymau dros fethiant diwedd arc ar ôl weldio
1. Methiant arc, gwall canfod signal
Rheswm: Ni dderbyniodd y peiriant weldio'r signal gan y robot, a achosodd i'r robot fethu â chau'r arc.
Dull:
(1) Gwiriwch a yw'r paramedrau gosod yn rhesymol
(2) Gwiriwch y signal IO, a gwiriwch a yw signal y pwynt terfynu I yn annormal. Os yw signal y pwynt I yn parhau i ddangos ON.
(3) Gwiriwch a oes cylched fer yn y llinell ac a yw'r wifren ddaear wedi'i chysylltu'n annormal
2. Nid oes gorchymyn stopio arc wedi'i osod ar ôl taro'r arc

Rheswm: Pan fydd y larwm hwn yn digwydd ar y pendant addysgu, gwiriwch a ydych chi wedi anghofio ychwanegu'r gorchymyn diweddu arc
Dull prosesu: ychwanegu gorchymyn diwedd arc ar ôl y gorchymyn cychwyn arc yn y rhaglen
Mae'r rhifyn hwn yn cyflwyno'n bennaf y problemau sy'n gysylltiedig â chychwyn arc, torri arc a diwedd arc robot weldio Yunhua yn ystod y broses weldio. Os bydd defnyddwyr yn dod ar draws problemau o'r fath yn ystod y defnydd, gallant gyfeirio at yr atebion. Os na ellir eu datrys, ceisiwch gymorth technegwyr Yunhua mewn pryd.
Os ydych chi eisiau gwybod mwy o broblemau ac atebion cyffredin Robot Yunhua, rhowch sylw i Gyfrif Swyddogol Robot Yunhua.
Mae robot weldio Yunhua yn robot awtomatig sy'n integreiddio weldio amlswyddogaethol fel weldio â gwarchod nwy, weldio arc argon, torri plasma, a weldio laser. Mae ganddo hyblygrwydd uchel, addasrwydd cryf, effeithlonrwydd weldio effeithlon ac ansawdd weldio sefydlog, a gellir ei ddefnyddio'n helaeth mewn amrywiol feysydd. Megis gweithgynhyrchu peiriannau, gweithgynhyrchu ceir, electroneg fanwl gywir a chloddio glo a meysydd eraill.
Amser postio: Gorff-15-2022



