Mae'r diwydiant modurol yn gyfystyr ag arloesedd, gan fynnu cywirdeb, cyflymder a dibynadwyedd di-baid wrth weithgynhyrchu cydrannau. Ymhlith rhannau modurol hanfodol, mae systemau gwacáu - yn enwedig pibellau gwacáu - yn chwarae rhan ganolog ym mherfformiad cerbydau, rheoli allyriadau a lleihau sŵn. Wrth i weithgynhyrchwyr ymdrechu i fodloni safonau ansawdd llym a thargedau cynhyrchu, mae robotiaid weldio wedi dod i'r amlwg fel offer anhepgor wrth gynhyrchu systemau gwacáu. Mae'r erthygl hon yn archwilio sut mae systemau weldio robotig, wedi'u hintegreiddio ag offer lleoli uwch felgosodwyr gogwydd cylchdroagosodiadau wedi'u haddasu, yn chwyldroi cynhyrchu pibellau gwacáu modurol, gan godi effeithlonrwydd, cysondeb ac ansawdd cynnyrch i lefelau digynsail.
1. Cymhlethdod Gweithgynhyrchu Pibellau Gwacáu
Mae pibellau gwacáu yn agored i amodau eithafol, gan gynnwys tymereddau uchel, nwyon cyrydol, a dirgryniadau mecanyddol. Er mwyn gwrthsefyll yr heriau hyn, maent fel arfer yn cael eu cynhyrchu o ddur di-staen neu ddur wedi'i alwmineiddio ac mae angen weldiadau di-dor, aerglos ar draws geometregau cymhleth. Yn aml, mae prosesau weldio â llaw traddodiadol yn ei chael hi'n anodd cynnal cysondeb mewn cymwysiadau o'r fath, gan arwain at ddiffygion fel mandylledd, asio anghyflawn, neu ystumio.
Fodd bynnag, mae robotiaid weldio yn rhagori wrth ymdrin â'r cymhlethdodau hyn. Wedi'u cyfarparu â chymal aml-echelin a'u cydamseru â systemau lleoli manwl gywir, maent yn darparu weldiadau di-ffael ar arwynebau crwm, fflansau a chymalau - sy'n hanfodol ar gyfer sicrhau cyfanrwydd y system wacáu.
2. Weldio Robotig ar Waith: Cymwysiadau Allweddol ar gyfer Pibellau Gwacáu
2.1 Weldio Tiwb-i-Flans a Thiwb-i-Ffwlwr
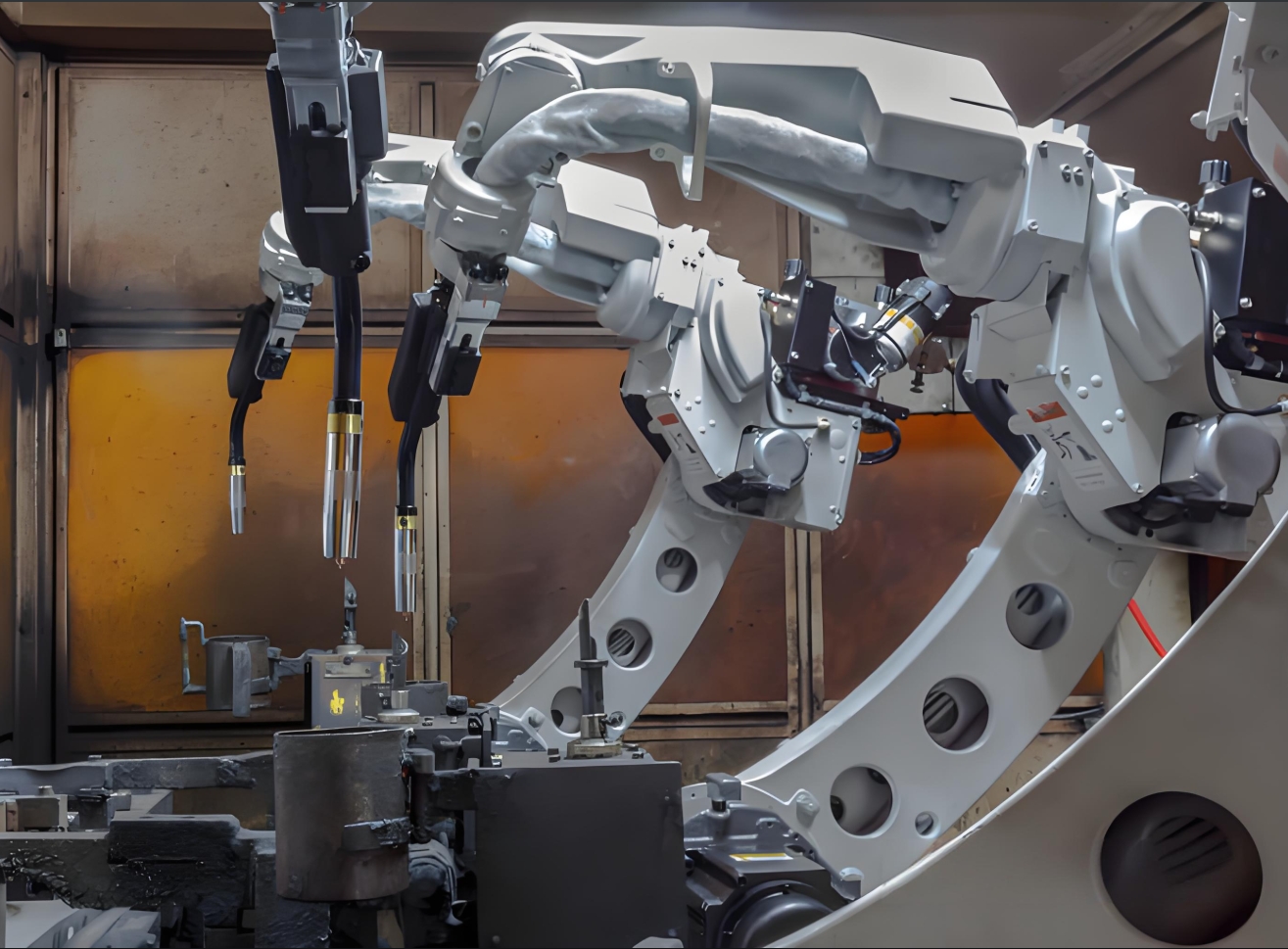
Mae systemau gwacáu yn cynnwys nifer o gydrannau, gan gynnwys pibellau, trawsnewidyddion catalytig, atseinyddion, a mufflers. Mae systemau weldio robotig yn awtomeiddio cysylltu tiwbiau â fflansau neu dai muffler, gan sicrhau treiddiad unffurf a lleihau parthau yr effeithir arnynt gan wres (HAZ). Er enghraifft, aRobot cymalog 6-echelyn gallu symud o amgylch cylchedd pibell, gan gynnal onglau ffagl a chyflymderau teithio gorau posibl hyd yn oed ar arwynebau contwrog.
2.2 Weldio Laser ar gyfer Cydrannau Wal Tenau
Mae pibellau gwacáu modern yn aml yn cynnwys dyluniadau waliau tenau i leihau pwysau wrth gynnal cryfder. Mae robotiaid weldio laser, gyda'u dwysedd ynni uchel a'u gwythiennau weldio cul, yn atal ystofio ac yn cadw priodweddau deunydd. Mae hyn yn arbennig o fanteisiol ar gyfer systemau gwacáu dur di-staen, lle mae cywirdeb yn hollbwysig.
2.3 Weldio Aml-Basio ar gyfer Cymalau Trwchus
Ar gyfer systemau gwacáu trwm mewn cerbydau masnachol, mae systemau weldio arc metel nwy robotig (GMAW) yn cynnal weldiadau aml-bas i adeiladu cymalau cadarn rhwng pibellau a bracedi â waliau trwchus. Mae algorithmau weldio addasol yn addasu paramedrau mewn amser real i ddarparu ar gyfer amrywiadau deunydd.
3. Gwella Hyblygrwydd gyda Lleolwyr Tilt Cylchdro
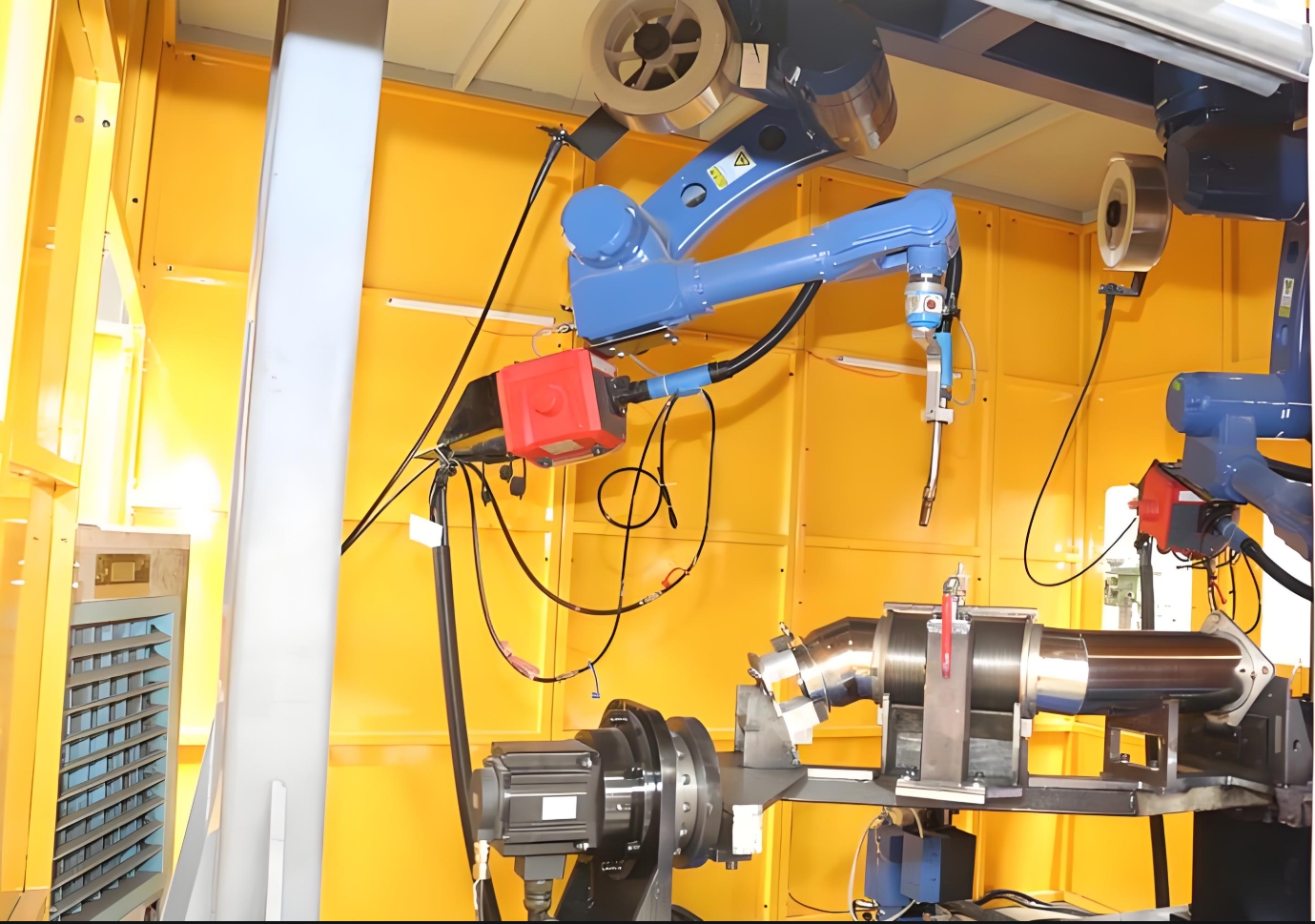
Mae effeithlonrwydd cell weldio robotig yn dibynnu ar gydlynu di-dor rhwng y robot a'r darn gwaith.Lleolwyr gogwydd cylchdroyn ganolog yn y broses hon, gan alluogi cylchdroi a gogwyddo pibellau gwacáu 360 gradd yn ystod weldio. Mae'r manteision yn cynnwys:
- Hygyrchedd Cymal Gorau posiblMae'r gosodwr yn ailgyfeirio'r bibell i gyflwyno'r sêm weldio yn y safle gwastad neu lorweddol, gan symleiddio rhaglennu robotiaid a lleihau amseroedd cylchred.
- Ail-leoli LlaiDrwy addasu'r darn gwaith yn ddeinamig, gall y robot gwblhau weldiadau lluosog mewn un gosodiad, gan leihau amser segur i'r lleiafswm.
- Ergonomeg GwellMae gweithredwyr yn llwytho/dadlwytho cydrannau tra bod y robot yn weldio, gan wneud y mwyaf o'r trwybwn.
Er enghraifft, mae gosodwr deuol-orsaf yn caniatáu i un bibell gael ei weldio tra bod y nesaf yn cael ei llwytho, gan gyflawni cynhyrchu bron yn barhaus.
4. Gosod Manwl: Asgwrn Cefn Cysondeb
Wedi'i addasugosodiadau weldioyn hanfodol ar gyfer dal cydrannau gwacáu mewn union aliniad yn ystod weldio robotig. Mae ystyriaethau dylunio allweddol yn cynnwys:
- Mecanweithiau ClampioMae clampiau niwmatig neu hydrolig yn sicrhau pibellau, fflansau a bracedi heb ddifetha arwynebau.
- ModiwlareddMae gosodiadau newid cyflym yn darparu ar gyfer gwahanol ddiamedrau neu gyfluniadau pibellau, sy'n ddelfrydol ar gyfer cynhyrchu modelau cymysg.
- Rheoli ThermolMae gosodiadau wedi'u gwneud o ddeunyddiau sy'n gwrthsefyll gwres yn gwrthsefyll amlygiad hirfaith i arcau weldio.
Mae gosodiadau uwch yn integreiddio synwyryddion i wirio lleoliad cydrannau cyn i'r weldio ddechrau, gan ddileu diffygion camliniad.
5. Mesur Enillion Effeithlonrwydd
Mae mabwysiadu systemau weldio robotig mewn gweithgynhyrchu pibellau gwacáu yn darparu gwelliannau mesuradwy:
- Gostyngiad Amser CylchdroGall weldiwr MIG robotig gwblhau weldiad cylcheddol mewn 60 eiliad, o'i gymharu â 180+ eiliad ar gyfer weldio â llaw.
- Amser Gweithredu UwchMae robotiaid yn gweithredu 24/7 gyda'r amser segur lleiaf posibl, gan gynyddu allbwn blynyddol 30–50%.
- Arbedion DeunyddMae rheolaeth paramedr fanwl gywir yn lleihau tasgu ac ailweithio, gan ostwng costau traul 15–20%.
Er enghraifft, adroddodd cyflenwr modurol Haen-1 aCynnydd o 40% mewn trwybwnar ôl defnyddio celloedd robotig gyda lleoliwyr cydamserol ar gyfer cydosod gwacáu.
6. Codi Ansawdd i Safonau Modurol
Mae weldio robotig yn sicrhau cydymffurfiaeth â meincnodau ansawdd modurol fel IATF 16949:
- AiladroddadwyeddMae robotiaid yn efelychu llwybrau weldio gyda chywirdeb o ±0.1 mm, gan ddileu amrywioldeb dynol.
- Canfod DiffygionMae systemau gweledigaeth integredig neu synwyryddion monitro arc yn canfod afreoleidd-dra yng nghanol y broses, gan sbarduno cywiriadau ar unwaith.
- DogfennaethMae systemau awtomataidd yn cynhyrchu logiau weldio y gellir eu holrhain, sy'n hanfodol ar gyfer archwiliadau ac yn ôl-alwadau.
Mae archwiliadau ar ôl weldio yn datgelu bod systemau robotig yn lleihau mandylledd a chyfraddau cracio dros 90% o'i gymharu â dulliau â llaw.
7. Cynaliadwyedd a Thueddiadau'r Dyfodol
Mae gweithgynhyrchwyr modurol yn rhoi blaenoriaeth gynaliadwyedd fwyfwy. Mae weldio robotig yn cefnogi'r newid hwn drwy:
- Lleihau'r Defnydd o YnniMae amser arc-ymlaen effeithlon a llwybrau symudiad wedi'u optimeiddio yn lleihau'r defnydd o bŵer.
- Lleihau GwastraffMae cyfraddau cynnyrch pas cyntaf uwch yn lleihau sgrap.
- Galluogi Pwysau YsgafnhauMae weldio manwl gywir yn hwyluso'r defnydd o ddeunyddiau uwch, teneuach heb beryglu gwydnwch.
Wrth edrych ymlaen,Robotiaid weldio wedi'u gyrru gan AIbydd yn defnyddio dysgu peirianyddol i hunan-optimeiddio paramedrau ar gyfer deunyddiau newydd, trarobotiaid cydweithredol (cobots)bydd yn cynorthwyo gweithredwyr mewn cynhyrchu sypiau bach.

Casgliad
Ym maes gweithgynhyrchu systemau gwacáu modurol sy'n cynnig llawer o bwyslais, mae robotiaid weldio—wedi'u hategu gan osodwyr a gosodiadau deallus—yn cynrychioli uchafbwynt peirianneg fanwl gywir. Drwy awtomeiddio tasgau weldio cymhleth, mae'r systemau hyn yn grymuso gweithgynhyrchwyr i gyflawni amseroedd cylch cyflymach, ansawdd di-fai, a chynhyrchu graddadwy. Wrth i reoliadau allyriadau gwacáu dynhau a dyluniadau cerbydau esblygu, bydd technoleg weldio robotig yn parhau i fod yn gonglfaen arloesedd, gan yrru'r diwydiant modurol tuag at ddyfodol mwy craff a glanach.
I weithgynhyrchwyr robotiaid diwydiannol, mae pwysleisio'r galluoedd hyn mewn cymwysiadau pibellau gwacáu nid yn unig yn tynnu sylw at arbenigedd technegol ond hefyd yn gosod eu datrysiadau fel partneriaid hanfodol wrth hyrwyddo rhagoriaeth gweithgynhyrchu modurol.
Amser postio: Mawrth-21-2025



